BCI試験と通信エラー:ESD保護デバイスがもたらす影響と対策
2025-12-24
車載ネットワークでは、CAN-FDや車載Ethernetなどの高速通信が普及する一方で、外来ノイズによる通信エラーのリスクも増大しています。
チップ形積層バリスタ(MLCV : Multi-Layer Ceramic Varistor)やTVSダイオード(ツェナー構造を持つもの)は、CAN-FD通信のESD対策(Electro-Static Discharge)として使用されるデバイスです。しかし、車載イミュニティ試験のひとつであるBCI試験(Bulk Current Injection)では、ESD保護デバイスの種類によってはノイズ注入時に通信エラーを引き起こすことが報告されています。
本記事では、BCI試験の概要から、通信エラーの発生メカニズム、ESD保護素子選定の注意点、MLCVによる具体的な対策までを解説します。
1. BCI試験とは?
BCI試験とは Bulk Current Injection試験の略称で、電子機器に接続されたハーネス(ケーブル)へ高周波のノイズ電流を注入し、外来ノイズによって機器が誤作動・故障しないかを確認するためのイミュニティ試験です。
自動車のEMC規格(Electromagnetic Compatibility)である国際規格ISO 11452-4に試験方法が定められており、多くの自動車メーカーで必須の評価項目となっています。試験はBCIプローブと呼ばれるクランプ式のカレントプローブを用いてケーブルにノイズ電流を誘導する形で行われ、基本的なノイズ周波数範囲は1MHzから400MHzです。
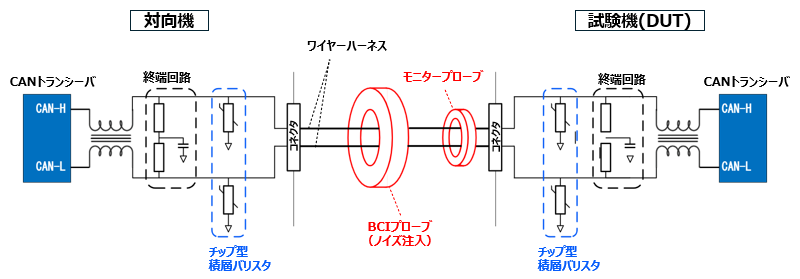
評価には置換法または閉ループ法のいずれかの手法が採用され、所定の電流(例:数百mA)になるように周波数ごとにノイズを印加して機器の動作への影響をチェックします。目的は、車載機器が実際の車両環境で遭遇し得る無線通信やエンジン周辺からのRFノイズに耐え、正常な動作を保証することです。図1にCAN-FDラインのBCI試験構成を示します。
2. BCI試験で起きる通信エラーのメカニズム
高周波ノイズをハーネス経由で印加するBCI試験では、通信ライン(例えばCAN-FDの差動信号線)にコモンモードノイズが重畳されます。
理想的な差動伝送ではこのノイズ成分はキャンセルされますが、実際の回路ではわずかな非対称性や非線形要素により差動ノイズへ変換(モード変換)されることがあります。これは信号経路のインピーダンス不均衡や、ESD保護デバイスが高周波ノイズに対してダイオード的な整流作用を示したり、インピーダンスが一時的に大きく変動したりすることで、コモンモードノイズを差動モードのノイズとして通信ラインに重畳させてしまうためです。
このように回路の非対称性が原因で2本の線にノイズが加わると、一方の線だけがわずかに強く影響を受けて波形のバランスが崩れます。その結果、本来一定であるべき差動電圧が一時的に低下し、受信側のビット誤判定による通信エラーを引き起こす一因となります。
例えばハーネスやトランシーバの実装では、信号線の長さや配線経路、部品の特性などにわずかな違いがあり、2本の線がまったく同じ条件で信号を伝えることはありません。量産フェーズでは、サプライヤー間の部品個体差や各車両のハーネス配置のバラつきなどの要素も波形のバランスを崩す要因として考慮する必要があります
3. ESD保護素子が引き起こす通信エラーの実例
車載通信ラインでは、ESD対策としてTVSダイオードやチップ形積層バリスタ(MLCV)などの保護素子が実装される構成です。しかし、その保護素子自体がBCI試験時の通信エラーを誘発するケースがあります。
ESD保護素子が通信品質に及ぼす影響を検証するため、高速CAN-FD(通信レート5Mbps)のバスラインに、ESD保護素子を搭載しない基板とパナソニック製チップ積層バリスタ(EZJPRV270RM、バリスタ電圧27V、静電容量15pF)、他社製品(TVS、VRWM24V、静電容量6pF)をそれぞれ実装して耐ノイズ性能を比較しました。テストはBCIプローブにより1MHz~400MHz帯で200mAまでのRF電流ノイズをハーネス(UTP: Un-shielded Twisted Pair)に印加し通信エラーの発生状況をモニタしています。表1に試験結果を示します.
| 評価サンプル | 試験結果 |
|---|---|
| リファレンス(ESD保護素子なし) | PASS |
| MLCV(EZJPRV270RM, 2in1) | PASS |
| TVS(2in1) | Error(7~26MHz) |
比較の結果、ESD保護素子を搭載しない基板ではどの周波数においても通信エラーは発生せず、MLCVを搭載した場合も同様にエラーは確認されませんでした。ところがツェナーダイオード(TVS※)を搭載した場合、7~26MHz付近の周波数帯で繰り返し通信エラーが発生しています。つまり、高速CAN-FDライン上では一見同等のESD保護を提供するデバイスでも、種類によっては特定の周波数帯でノイズに弱い(=通信エラーを起こす)ことが明らかになりました。
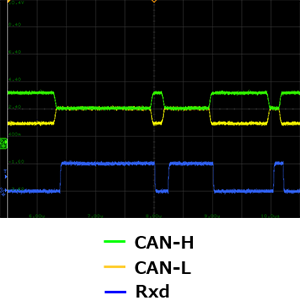
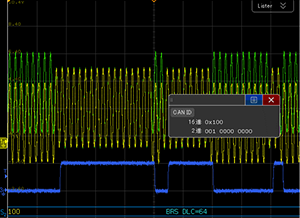
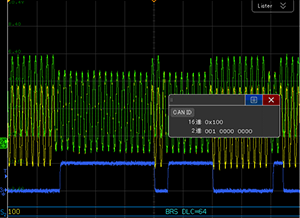
図2にBCI試験において、10MHzのノイズを印加した際のCAN-H/CAN-L信号とCANトランシーバで受信したデータ(Rxd)の波形を示します。リファレンスとMLCVを搭載した基板ではCAN-H/CAN-Lの信号に10MHzのノイズが重畳されていますが、RxdはBCIノイズ印加前と同じ波形であり、エラーが発生していないことがわかります。一方で、TVSを搭載した基板ではRxdが赤丸部分でBCIノイズ印加前と異なっており、正しくデータが送信できていない(=エラーが発生した)ことがわかります。
| 評価サンプル | BCIノイズ印加前 | BCIノイズ@10MHz印加時 |
|---|---|---|
| リファレンス (ESD保護デバイスなし) |
 |
 |
| MLCV (EZJPRV270RM) |
 |
|
| TVS | 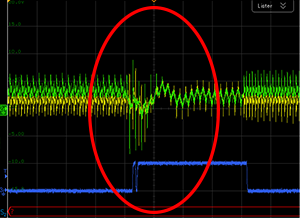 |
4. ツェナーダイオードで発生する「逆回復」現象のメカニズム
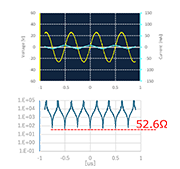
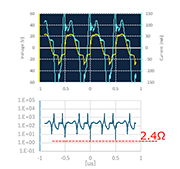
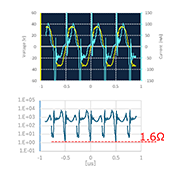
ツェナーダイオード(TVS)で何が起きていたのかを解明するため、ESD保護デバイス単体に2MHzの大振幅の正弦波ノイズを印加して動作特性を調べました。
解析結果から、ツェナーダイオード(TVS)の波形歪みはPNダイオード特有の逆回復現象に起因することが突き止められました。具体的には、ツェナーに一定以上の電流(動作電流)が流れた状態で正弦波の極性が反転するとき、ダイオード内部に蓄積された電荷が一気に放電されて大きな逆方向電流が流れます。
この逆回復電流により、ツェナーの端子間インピーダンスが一時的にわずか数Ωまで低下してしまうのです(図3)。評価では、MLCVが動作時でも約30Ωのインピーダンスを保っていたのに対し、ツェナーでは極性反転の瞬間に1~2.5Ω程度まで低下することが確認されています。
その結果、CAN-FDラインとGND間の見かけ上のインピーダンスが終端抵抗60Ωより大幅に低くなり、信号が正常な振幅を保てなくなって通信エラーに至るというメカニズムです。
| 印加電圧 | MLCV EZJP0V270RM |
A社製 TVS |
B社製 TVS |
|---|---|---|---|
| 約±27Vpp | 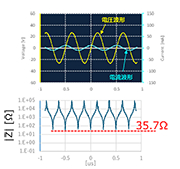 |
 |
 |
| 約±37Vpp | 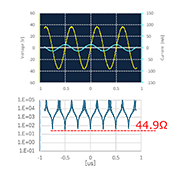 |
 |
 |
| 約±54Vpp | 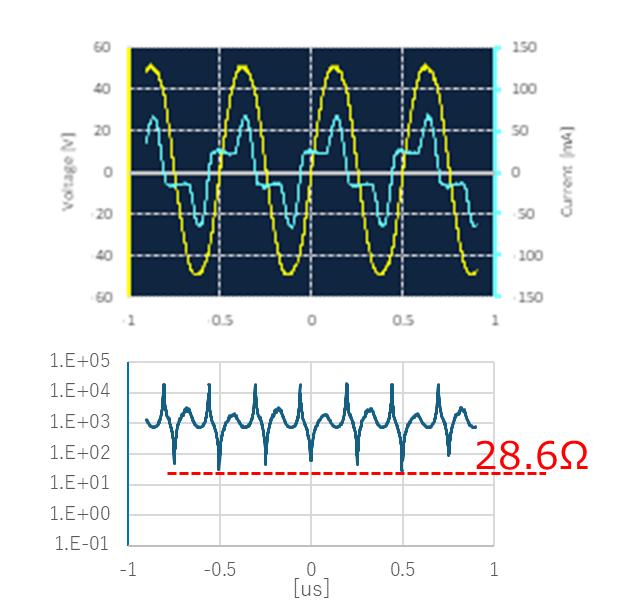 |
|
|
5. V-I特性から見るツェナーダイオードとMLCVの違い
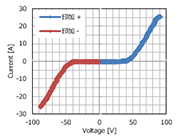
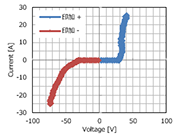
静的なV-I特性(電圧-電流特性)を比較してもツェナーダイオード(TVS)とMLCVの動作の違いが分かります。
TLP法(Transmission Line Puls)による測定の結果、ツェナーダイオード(TVS)では極性によって動作電圧や電流の立ち上がり方が異なり、正負で非対称な特性を示しました(図4)。たとえデータシート上は「双方向(両極性)ツェナー」とされる製品でも、実際にはV-I特性が完全に対称ではない場合があり、プラス側とマイナス側で動作タイミングに差が生まれます。結果として片側の極性で先に導通が起き、波形の片側だけが削られるような整流的な挙動を示して高周波ノイズへの影響を助長する可能性があります。
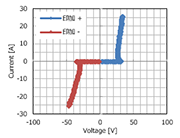
一方、MLCVはプラス・マイナス両極性でほぼ対称なV-Iカーブを示しました。MLCVの構造的に対称かつ蓄積電荷による遅延現象もないため、今回の評価でも高調波ノイズに対し安定した動作を示し、通信エラーを引き起こさなかったと考えられます。要するに、ESD保護デバイスの種類によって高周波ノイズ印加時の動作特性が大きく異なるため、その差が通信ライン上の信号波形の歪みや振幅変動を引き起こし、通信ラインの安定性に影響し得るということです。
| MLCV/Panasonic EZJP0V270RM |
A社製 TVS |
B社製 TVS |
|
|---|---|---|---|
| 動作電圧 | 27Vtyp. @1mA | 30Vtyp. @10mA | 27V @1mA |
| 静電容量 | 15pFtyp. @1MHz | 5.2pF @1MHz,DC2.5V | 30pFtyp. @1MHz |
| 極性 | 双極性 | 双極性 | 双極性 |
| ■電圧・電流特性比較 | |||
| 電圧-電流特性 (TLP) |
 |
 |
 |
| 極性 | 双極性 | 双極性 | 双極性 |
| 対称性 | 対象 | 非対称 | 非対称 |
| 非直線性 | △ | 〇 ※キックバック有 | △ 正負バラツキ有 |
6. ESD保護デバイス選定・設計のポイント
以上の知見から、BCI試験のような高周波ノイズ環境下で通信エラーを防ぐには、ESD保護デバイスの選定と設計上の配慮が極めて重要だと分かりました。以下に、車載通信ライン向けESD保護素子を選ぶ際に注目すべきポイント3つを一般化してまとめます。
十分高い動作電圧の設定
ノイズに対して不用意にデバイスが動作(導通)しないよう、ツェナー電圧やバリスタ電圧が通信信号+ノイズの想定最大レベルを上回る製品を選定します。BCI試験で誘導される正弦波ノイズ程度では保護素子が動作しない電圧マージンが望ましいです。
正負両極性で対称な特性
差動ラインに用いる保護素子は両極性に対称な動作電圧を持つことが理想です。さらに、ツェナー系であればブレークダウン後のV-Iカーブ(動作抵抗や電流特性など)が正負で偏らない製品を選びます。対称性が高いほど、コモンモードノイズが差動ノイズに変換されにくくなります。
逆回復特性(Trr)の優れたもの
ツェナーダイオード(TVS)を採用する場合、逆回復時間(Trr)が短く、個体差が小さいデバイスを選びます。逆回復電流の発生を抑えることで、前述のような一時的なインピーダンス低下現象を起こりにくくする狙いです。
7. 車載CAN-FD対応「チップ形積層バリスタ 2in1タイプ」の特長
前項で説明したように、BCI試験における通信エラーはESD保護デバイスの動作特性に依存します。通信エラーが起きる可能性があるツェナーダイオード(TVS)に代わり有効な対策として注目されているのが、チップ形積層バリスタ(MLCV)です。
MLCVはセラミック誘電体を多層化した構造を持ち、PN接合を用いないため逆回復電流が発生しにくい構造を持ちます。逆回復電流が流れにくいため、ノイズ印加時でもインピーダンスが安定し、通信波形の歪みを最小限に抑えられます。
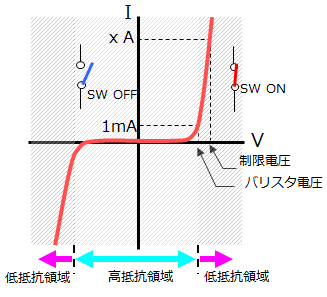
MLCVは正負両極性でほぼ対称なV-I特性を持つ点も特長です。対称なV-I特性により、差動ライン上で発生するコモンモードノイズが差動成分に変換されにくく、通信波形が崩れにくくなります(図5)。
特にCAN-FDやEthernetなどの高速差動通信では、わずかな波形の歪みによって信号の立ち上がりや振幅が乱れ、隣接ビットが正しく識別できなくなるケースも珍しくありません。MLCVはこのような現象を抑制し、安定した通信を実現できます。
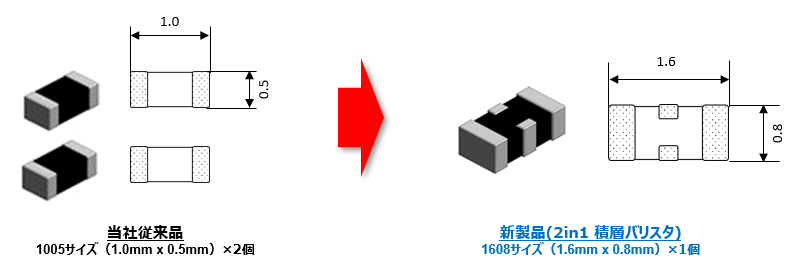
最近ではCAN-FDの差動ペアのESD保護を目的とした今回評価対象として用いた2in1タイプのMLCVも登場しました。2in1タイプでは1パッケージ内に2素子を内蔵し、CAN_HとCAN_Lをそれぞれ保護する構造をとっています。
2素子が同一チップ上に形成されているため、電気特性のばらつきが小さく、両ラインに対して常に同一の動作をします。その結果、一方の信号線だけが過度に電圧制限されるような偏りが起こりにくく、通信波形の対称性を実現することが可能です。また、2素子間の静電容量の差も小さく、静電容量差に起因するモード変換を抑制することができ、BCI試験でのエラー発生を抑えることが期待できます.
2in1タイプのMLCVはESD保護素子としての基本性能を備えつつ、逆回復電流が発生しにくい特性を持ち、かつ、モード変換も抑制できるため、次世代車載通信設計における有力な選択肢として期待されています。
8. まとめ
BCI試験では、印加される高周波ノイズにより通信ラインの波形が歪み通信エラーが発生する事例が報告されています。原因として考えられるのは、ESD保護デバイスがノイズ電流に反応して一時的にインピーダンスが低下し、信号が不安定になる現象です。
特にツェナーダイオード(TVS)では、電圧の極性が反転する瞬間に逆回復電流が流れ、端子間インピーダンスが数Ωまで低下します。その結果、通信ラインの信号電流がGND側に流れ、差動電圧が低下してビット誤判定を引き起こす不具合につながります。
一方、チップ形積層バリスタ(MLCV)はPN接合を持たないため逆回復電流が発生しにくく、動作中でも数十Ωレベルのインピーダンスを維持することが可能です。加えて、正負両極性でほぼ対称なV-I特性を持ちます。結果、コモンモードノイズが差動成分に変換されにくく波形の歪みを抑制できるため、BCI試験時でも通信エラーを防止することが可能です。
上記の特性により、MLCVはESDとしての保護機能と、ノイズ環境下でも安定した通信品質を両立できるデバイスといえます。今後CAN-FDや車載Ethernetといった高速通信の普及に伴い、MLCVは重要なソリューションとして、その役割がますます期待されます。
9. この記事に関する製品情報
10. 関連記事
11. この記事に関連するタグ