自動運転技術におけるLiDARとは?
~センシング機能の高性能化のポイント~
2023-04-21

LiDAR(Light detection and ranging)とは、レーザー光を用いたセンサーの一種です。レーザー光を広範囲に順次照射し、対象物に当たったレーザー光が反射されて戻ってくるまでの時間を精密に計測します。レーザー光を照射した方向と、戻ってくるまでの時間を組み合わせることで対象物までの距離が分かり、照射する方向を変えて計測を繰り返すことで物体の認識が可能です。自動運転車には必須と言える技術であり、LiDARの搭載数は年々増加していくと予想されています。本記事では、LiDARの機能とシステム構成について解説し、LiDARを構成している電子部品についてもご紹介します。
1 LiDARとは?
LiDAR(Light Detection And Ranging)とは、レーザー光を対象物に照射して、反射されて戻ってくるまでの時間を計測するセンシング技術です。ADAS、ADシステムにおいては周囲の物体をセンシングするために利用することが多く、カメラ、Radar、LiDAR、Sonarなどを組み合わせて使われています。LiDARにはいくつかの光軸可変方法が存在します(表1)。
| 光素子 | 光軸可変方式 | タイプ | スキャン方法 |
|---|---|---|---|
| LD、PD | メカ方式 | モータ回転 | 多数のLD、PDを回転し全周をスキャン |
| ポリゴンミラー | 単体LD、PDの光軸をポリゴンミラーで可変しスキャン | ||
| メカレス式 (ソリッドステート) |
MEMSミラー | 単体LD、PDの光軸をMEMSミラーで可変しスキャン | |
| フェーズドアレイ | 単体LD、PDの光軸を導波路にて可変しスキャン | ||
| フラッシュ | LED等光源を広範囲に照射し反射光をPDアレイで一括スキャン |
2 距離計測と物体認識の方法
距離計測と物体認識の方法については以下の通りです。
<距離計測>
レーザーダイオードからレーザー光パルスを照射し、対象物からの反射光をフォトダイオードで受光する。照射から受光までの時間から物体との距離を計測する。
<物体認識>
レーザー光パルス照射時の方向と距離を使用して、点群による画像を作成する。その画像を使用して、人や物などの物体の種類を認識する。点群とは、物体の位置情報を点の集合体として表現したものを指す。
3 LiDARの活用方法
車載LiDARの活用方法として、主に以下の3つがあります。
障害物認識
取得した点群画像から障害物を認識する。
ダイナミックマップ作成
点群データと3次元地図データを組み合わせ、自動運転に必要なダイナミックマップの基板となるデータを作成する。
自車位置把握・補正
ダイナミックマップにより自車の走行位置や周囲の障害物などを把握し、正常な走行位置へ補正する。
4 LiDARの市場・機器トレンド
自動運転車の台数増加と自動運転レベルの向上に伴い、LiDAR搭載数の増加が予想されています。自動運転レベルが上がれば、その分LiDARのセンシング機能の高性能化が求められます。今後、LiDARを構成する電子部品に求められる機能・性能として、「高電力化」「通信高速化」「小型化/軽量化」が挙げられ、それぞれの要件は以下の通りです。
●高電力化
障害物の認識精度を向上させるためには、取得する点群がより細かくなければなりません。高解像度化によりデータの処理量が増加すれば、メインCPUといった半導体の消費電力も増加するため、高電力化が必要不可欠です。
●通信高速化
データ量増加に伴い、高周波かつ高速伝送処理能力の向上が求められています。
●小型化/軽量化
上記のような課題に加え、電子部品のサイズダウンを図る必要があります。
5 LiDARのシステム構成について
5-1 全体構成
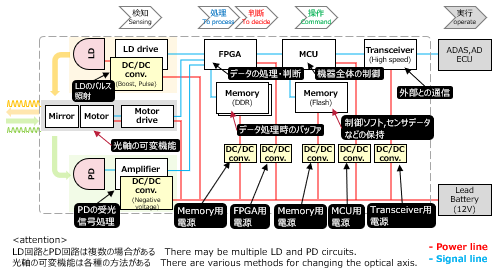
LiDARシステムは下記部品によって構成されており、図1にシステム構成を示します。
●レーザーダイオード:高速でパルス状の電流を流し、波長と位相のそろったパルス状のレーザー光を照射する。
●フォトダイオード:光を電気信号に変える働きをする。受光により電流、電圧が発生する。フォトダイオード受光回路にアンプを組み込み、出力電圧を増幅させる。
●FPGA:製品に組み込んだ後であっても、回路を書き換えて任意の論理回路構成を設定できる集積回路。
●MCU(マイコン):制御指示を、外部のECUに与える。
●トランシーバー:外部と通信するためのデバイスまたは回路。
●メモリ(DDR):データ処理時のバッファとして使用する。
●メモリ(フラッシュ):制御ソフトやセンサデータを保持する。
●DC/DCコンバータ:バッテリーからの電圧を、電子部品や回路ごとに必要な電圧へと変換する。
6 個別回路および構成部品
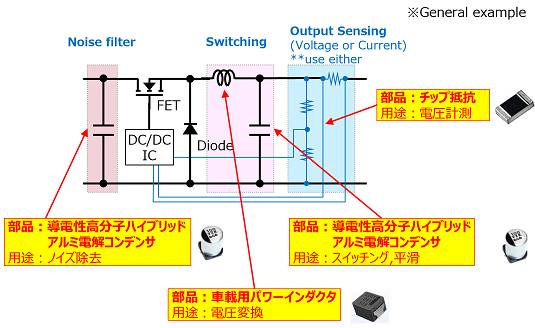
6-1 DC/DCコンバータ
DC/DCコンバータ回路では、入力部のノイズ除去と、出力部の平滑には導電性高分子ハイブリッドアルミ電解コンデンサ、電圧変換には車載用パワーインダクタ、電圧計測にはチップ抵抗(高精度チップ抵抗器)を用いるのが一般的です。
ノイズ除去、スイッチング・平滑 ―― 導電性高分子ハイブリッドアルミ電解コンデンサ
POINT- ❶ 大容量&低ESR&高リプル性能により、回路の小型・大電力化(低電圧&大電流)に貢献
- ❷ 容量特性の高周波対応により、回路の高周波スイッチング化で発生するノイズの広帯域&高周波除去に貢献
電圧変換 ―― 車載用パワーインダクタ
POINT- ❶ 金属磁性材での低損失&大電流性能により、回路の小型・大電力化(低電圧&大電流)に貢献
- ❷ 損失特性の高周波化(低ACR)により、回路の高周波スイッチング化における損失抑制に貢献
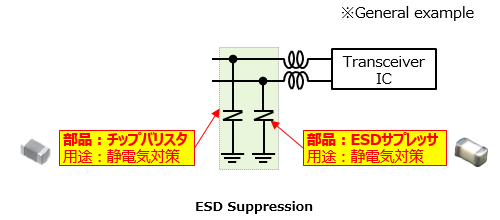
6-2 トランシーバー I/F
図に示すように、トランシーバー回路では、2本の線を使って外部の機器と通信します(CAN、Ethernetなど)。ここで注意しなければならないのが静電気とノイズです。通信線から静電気やノイズが混入すると、最悪の場合は電子部品の故障につながるためです。静電気対策用としてチップバリスタ、ESDサプレッサで構成するのが一般的です。
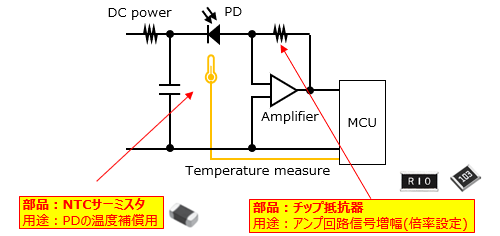
6-3 フォトダイオード受光回路
フォトダイオードは、入射した光の強さに比例した電流を出力します。レーザー反射光は弱いため、アンプ回路を利用して信号を増幅しなければなりません。精度の高いアンプ回路を実現するためには、高精度のチップ抵抗と、温度による特性変化に対して補償するサーミスタが必要です。
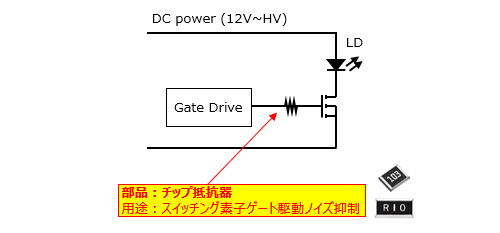
6-4 レーザーダイオード照射回路
照射回路はいたってシンプルで、レーザーダイオード、FET(GaN)とゲート抵抗で構成されています。高速かつ大電流でのパルス照射を行う為に、FET(GaN)を精度良くON/OFFさせる必要があります。又、ON/OFF時のノイズを抑制する事が重要となり、高電力対応のゲート抵抗を使用する必要があります。
7 まとめ
自動運転車台数の増加と自動運転レベルの向上に伴い、LiDARの増加が予想されています。自動運転レベルが上がれば、センサー機能の一層の高性能化が求められます。自動車に搭載される、LiDARをはじめとしたセンサーデバイスの数は増えることはあっても減ることはないでしょう。そうしたデバイスやその周辺回路に使われる電子部品には、「低損失」「大電流」「高周波」「小型」がより求められることは間違いありません。パナソニックインダストリーでは、LiDAR向けに幅広い商品ラインアップを取りそろえています(表2)。
| 部品 | 特長 | 大電流 | 低損失 | 高周波 | 小型化 | 高精度 |
|---|---|---|---|---|---|---|
導電性高分子ハイブリッドアルミ電解コンデンサ |
低ESR 高信頼性 |
✔ | ✔ | ✔ | ✔ | |
車載用パワーインダクタ  |
大電流、低損失 高信頼性 |
✔ | ✔ | ✔ | ✔ | |
 |
高精度、高耐熱 | ✔ | ✔ | |||
チップバリスタ |
小形・軽量化 | ✔ | ||||
ESDサプレッサ |
低静電容量 超高速データ I/F |
✔ | ✔ | |||
NTCサーミスタ(チップ形) |
小形、高耐熱 | ✔ | ✔ |
8. この記事に関する製品情報
9. 関連記事
この記事に関連するタグ

LiDARの機能とシステム構成について解説し、LiDARを構成している電子部品についても紹介します。