自動運転技術におけるドメイン制御ユニット(DCU)とは?
~高性能化をになう電子部品~
2023-02-20

DCU(Domain Control Unit)とは、自動車内システムにおいてデータを総合的に処理・判断し、車の操作を命令するECU(Electronic Control Unit)の一種です。運転支援技術や自動運転技術の進歩により、DCUの数は年々増加していくと予想されています。本記事ではADAS/AD用DCUの機能とシステム構成について解説し、DCUを構成している電子部品のラインアップについてもご紹介します。
1 ADASとADの違いについて
ADAS(Advanced driver-assistance systems)とは、先進運転支援システムのことです。ドライバーの運転を補助・アシストすることで、走行安全性の向上を図ります。一方でAD(Autonomous Driving)は自動運転を指し、人間に代わってシステムが主体となり自動で運転を行います。
自動運転はSAE(Society of Automoitve Engineers:米国の自動車関連技術者団体)によって、レベル0~5まで定義されています。レベル0~2までは人が運転の主体で、レベル3からは車に切り替わります。
| Level | 名称 | 主体 | 走行領域 | 備考 |
|---|---|---|---|---|
| 0 | 運転自動化なし | 人 | - | 人が全て運転する |
| 1 | 運転支援 | 人 | 限定的 | 車周囲監視等の一部にて運転を支援する |
| 2 | 部分運転自動化 | 人 | 限定的 | “Hands off / 手の開放” 特定環境下にて運転を自動化する |
| 3 | 条件付き運転自動化 | 車 | 限定的 | “Eyes off / 目の開放” 特定環境下にて運転を自動化する |
| 4 | 高度運転自動化 | 車 | 限定的 | “Brain off / 脳の開放” 特定環境下にて運転を自動化する |
| 5 | 完全運転自動化 | 車 | 限定無し | 車が全て運転する |
2 ADAS/ADのシステム構成
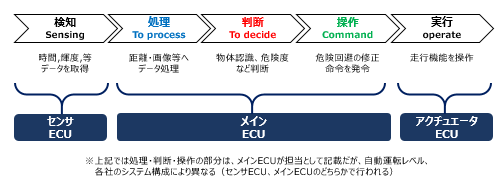
ADAS/ADを実現するためには、センサECU、メインECU、アクチュエータECUが必要です。
- センサECU:周囲環境などを認識する(カメラ、RADAR、LiDAR、超音波センサなど)
- メインECU:データの処理・判断等を行う(ADAS-ECU、AD-ECU、DCUなど)
- アクチュエータECU:運転操作・支援を行う(アクセル、ブレーキ、ステアリング、モーター、エンジンなど)
また、検知から実行までの流れは以下図1に示す通りです。
3 ドメイン型とゾーン型について
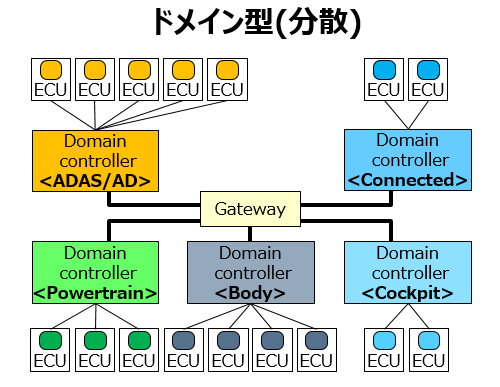
ADAS/AD向けのシステム構成としては、ドメイン型(分散)とゾーン型(集中)があります。
- ドメイン型:機能ごとにドメインと呼ばれるグループに分類し、そのドメインごとにECUが集約されています。ゲートウェイを経由して、他ドメインとの接続を行い、各ドメインECUにおいてデータの処理が行われます。
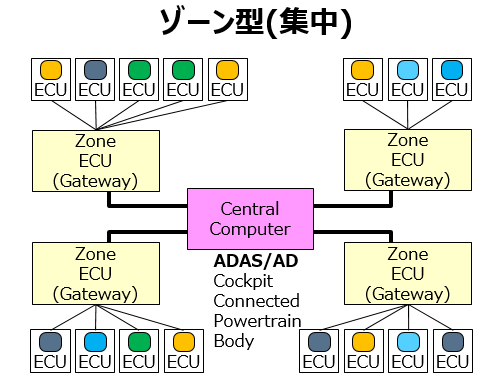
- ゾーン型:車体の位置的な要所ごとにECUが集約されています。さらにシステム中央部にセントラルコンピュータが設置され、ここで要所から集められたデータの処理や操作が行われます。
| 構成 | 接続 | ネットワーク |
|---|---|---|
| ドメイン型 | 各カテゴリ(ドメイン)毎にECUを集約 他ドメインとはGateway経由で接続 各ドメインECUにてデータの処理行う |
Sensor~Domain間は其々共通のネットワーク規格 Domain~Gateway間は共通のネットワーク規格 |
| ゾーン型 | 車体の前後等のゾーン毎に異なるカテゴリのECUを集約 各ゾーンからセントラルコンピュータに集約 セントラルコンピュータにてデータの処理を統合・集中 |
Sensor~Zone間は異なるネットワーク規格が混在 Zone~Central computer間は共通のネットワーク規格 |
4 ADAS/AD用DCUとは
DCU(Domain Control Unit)は、機能ドメインごとに存在します(例:ADAS/AD、通信、パワートレーン、ボディー、コックピット)。各DCUは、同じドメインとなる多数の機器を集約し、データを統合的に処理・判断を行うことと、他のDCUとの連携・データ送受信によって車や機器を操作する役割を担っています。
例えば、ADAS/AD向けのDCUでは、各種センサ機器が集約されており、データを総合的に処理・判断し、安全運転支援や自動運転の操作を実行しています。
5 DCUの市場&機器トレンド
ドメイン型システムのDCUを搭載する車両は、自動運転レベル2以下を中心に、増加が予測されています。自動運転のレベルがさらに高くなれば、その分搭載するセンサの数を増やして、周囲の環境データを取得しなければなりません。センサが増えることにより、DCUではデータ処理量が増加し、処理を行うメインの半導体は高性能化と共に消費電力が増加します。
DCU向けデバイスとしては、「大電流」「低損失」「小型化」「高周波数」「高精度(電圧)」が求められていくと考えられます。
6 DCUのシステム構成
6-1 概要
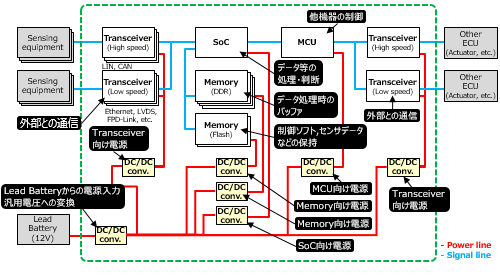
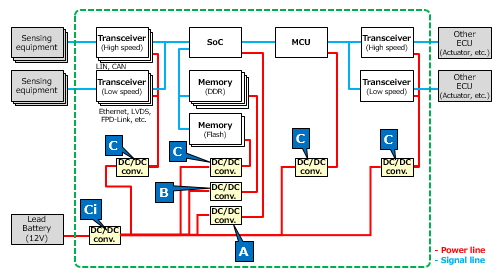
DCUとその周辺機器は、以下の図3に示すように接続されています。DCUの内部は、センサECUまたは他DCUとの通信を行うトランシーバー回路、センサECUからのデータを処理・判断するSoC(System on a Chip)と各種メモリ、SoCで判断した内容を基に走行を制御するMCU、これら各種回路の動作に必要なDC/DCコンバータ電源回路で構成されています。
6-2 トランシーバー I/F
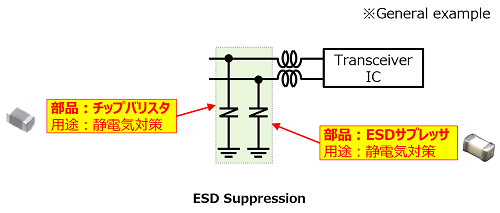
図4に示すように、トランシーバー回路では、2本の線を使って外部の機器との通信を行います(CAN、Ethernetなど)。ここで注意しなければならないのが静電気とノイズです。通信線から静電気やノイズが混入すると、最悪の場合は電子部品の故障につながるためです。静電気対策用としてチップバリスタ、ESDサプレッサで構成するのが一般的です。
6-3 DC/DCコンバータ
(1)DC/DCコンバータとは
DC/DCコンバータとは、直流電圧を異なる直流電圧に変換する回路です。それぞれの回路に必要な電圧値は異なっており、それに合う電圧に変換が必要です。DC/DCコンバータの回路はFET、コイル、コンデンサで構成するのが一般的です。
(2)タイプ別の回路構成
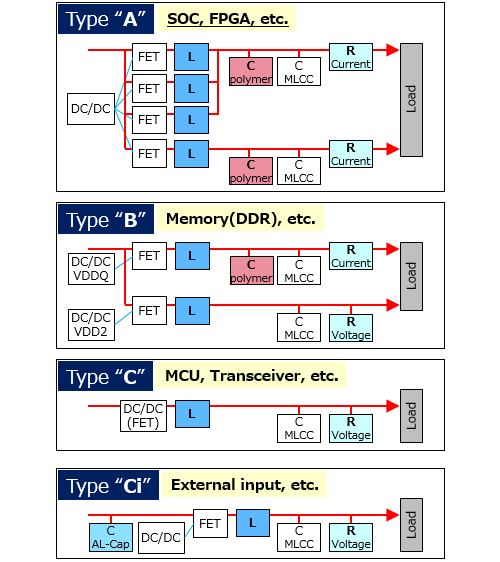
取り扱う電力、電圧、電流、負荷の過渡応答によって、DC/DCコンバータの回路構成は異なります。図5に示すように、回路構成には大きく3つのタイプがあります。
<TYPE A>
電流値が非常に大きいため、複数のコイルとFETを使用して、負荷電流を分担します(マルチフェーズ)。また、瞬間的に急激な電流変動が発生すると電圧が下がるため、MLCC(セラコン)以外にポリマーコンデンサを使用して、電圧降下防止を図ります。
<TYPE B>
電流が多く流れる回路で、容量の大きいコンデンサを使用します。ここでもMLCC(セラコン)以外に、ポリマーコンデンサを使用します。
<TYPE C>
一般的なDC/DCコンバータの回路です。
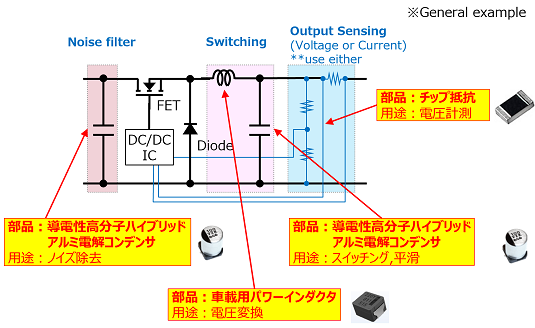
DC/DCコンバータ回路では、入力部のノイズ除去と、出力部の平滑には導電性高分子ハイブリッドアルミ電解コンデンサ、電圧変換には車載用パワーインダクタ、電圧計測にはチップ抵抗(高精度チップ抵抗器)を用いるのが一般的です。
ノイズ除去、スイッチング・平滑 ―― 導電性高分子ハイブリッドアルミ電解コンデンサ
POINT- ❶ 大容量&低ESR&高リプル性能により、回路の小型・大電力化(低電圧&大電流)に貢献
- ❷ 容量特性の高周波対応により、回路の高周波スイッチング化で発生するノイズの広帯域&高周波除去に貢献
電圧変換 ―― 車載用パワーインダクタ
POINT- ❶ 金属磁性材での低損失&大電流性能により、回路の小型・大電力化(低電圧&大電流)に貢献
- ❷ 損失特性の高周波化(低ACR)により、回路の高周波スイッチング化における損失抑制に貢献
7 まとめ
自動運転実現のために必要不可欠なDCUは、これからますます搭載数が増加する見込みです。自動運転のレベルが高くなるほど、搭載するセンサの数を増やして、周囲の環境データを取得しなければならないためです。今後は半導体の消費電力を抑えつつも、「大電流」「低損失」「高周波」「小型」に対応することが求められます。パナソニック インダストリーでは、DCU向けとしてさまざまな要求に応える幅広い商品群と、高機能なデバイスを取りそろえています(表)。
| 部品 | 特長 | 大電流 | 低損失 | 高周波 | 小型化 |
|---|---|---|---|---|---|
導電性高分子ハイブリッドアルミ電解コンデンサ |
低ESR 高信頼性 |
✔ | ✔ | ✔ | ✔ |
車載用パワーインダクタ  |
大電流、低損失 高信頼性 |
✔ | ✔ | ✔ | ✔ |
チップ抵抗(高精度チップ抵抗器) |
高精度、高耐熱 | ✔ | |||
チップバリスタ |
小形・軽量化 | ✔ | |||
ESDサプレッサ |
低静電容量 超高速データ I/F |
✔ | ✔ |
8. この記事に関する製品情報
9. 関連記事
10 この記事に関連するタグ
自動運転技術の進歩により今後も増加が予想されるADAS/AD用DCUの機能とシステム構成について解説します。