"CASE"時代を迎えた自動車のトレンドと技術課題(3)
自動運転と認識エンジン
2020-02-17
今回は、"CASE" 時代を迎えた自動車のトレンドと技術課題の3回目として、実用化に向けて開発や実証実験が急ピッチで進む自動運転と、自動運転の「認知」をつかさどる認識エンジンの概要を取り上げます。
開発と実証実験が進む自動運転機能
自動運転機能の実用化が迫ってきました。節目となるのが2020年7月から開催される東京オリンピック・パラリンピックです。選手村内での移動 (循環ルート) に自動運転車 (レベル4) が導入されることが決まっているほか、羽田空港周辺や臨海副都心地域で自動運転にまつわるさまざまな実証実験が計画されています。
自動運転にはいくつかのレベルがあり、アメリカ自動車技術会 (SAE) が「SAE J3016」として定める6段階が広く使われています (表1) 。 (日本においては政府が公表した「官民ITS構想・ロードマップ2019」で同様の定義がまとめられています)
前方の障害物を検知してブレーキをアシストするなどのいわゆるADAS (先進運転支援システム) は、一般にレベル1に該当します。また、アダプティブクルーズコントロールと自動車線維持の同時作動など、レベル2の機能もすでに実用化されています。レベル3の機能を搭載した市販車も登場していますが、法整備の問題もあり国内ではまだ販売されていません。
| ドライバーの役割 | 機能 | 機能の例 | |
|---|---|---|---|
| SAEレベル0 | 常にドライバーが運転操作を行う、ただし支援機能作動時はペダルから足を離したり、ステアリングから手を離したりしてもよい | 警告や一時的アシストのみ | 自動緊急ブレーキ、死角警告、車線逸脱警告など |
| SAEレベル 1 | 加減速か操舵のいずれかのアシスト | 車線維持またはアダプティブクルーズコントロール | |
| SAEレベル2 | 加減速と操舵の両方のアシスト | 車線維持とアダプティブクルーズコントロールの同時動作 | |
| SAEレベル3 | ドライバーの介在は不要 (レベル3のみシステムが要求したときは介在する) | 限定条件下での自動運転、すべての条件が揃わない状態では作動不可 | 渋滞時の自動追従走行など |
| SAEレベル4 | 特定エリアでの無人タクシーなど | ||
| SAEレベル5 | あらゆる条件での自動運転 | エリアを問わない無人タクシーなど |
(SAEが2018年に公表した 「SAE J3016」のチャート を元に弊社で作図)
{kind=link}
センサーの主役は、カメラ、レーダー、LiDAR
ADASや自動運転は、 (A) 認知、 (B) 判断、 (C) 操作の主に三つの機能で実現されます (ドライバーによる運転も同様) 。
このうち、 (A) 認知を担うのがセンサーおよび認識エンジン (認識プロセッサ) で、車両前方の歩行者、自転車、対向車、駐車車両、障害物、車線、標識、信号機などのほか、後方や側方を走る追越車両、隣車線の併走車などを適切に認識し、その情報を後段の判断機能へ与えます。
センサーとしては、カメラ、レーダー、LiDARなどが用いられます。
カメラ
カメラには、単眼カメラ、視差から奥行き情報を得るステレオカメラ (2眼) 、ステレオカメラに焦点距離の異なる単眼カメラを組み合わせた3眼カメラなどの方式があります。大まかには記載した順にセンシング精度は高くなりますが、同時にコストも上がります。
単眼カメラでも、自車が移動していれば、あるフレームとその後のフレームの視差から歩行者や物体までの距離が分かります。そのため、コストの安い単眼カメラは現在でも多く使われています。

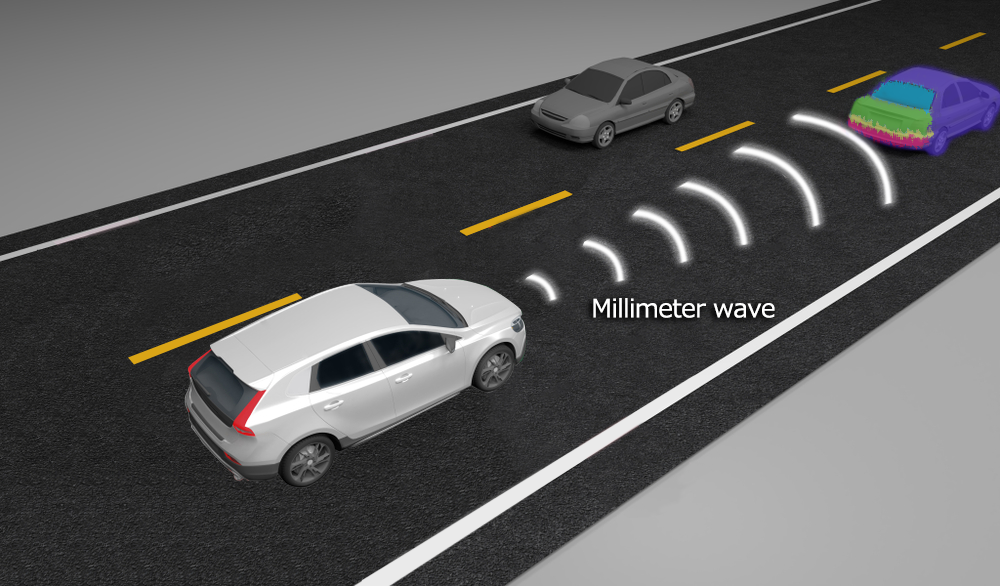
レーダー (RADAR : RAdio Detection And Ranging)
レーダーはミリ波やマイクロ波を照射し、その反射から周囲にいる人物や物体の距離や位置をセンシングするテクノロジーです。数年前は24GHzレーダーが主流になると見込まれていましたが、電波帯の割り当ての制約によって帯域が200MHz程度と狭いため、4GHz程度の帯域が利用できてアンテナ・モジュールも小型化できる77GHz帯に注目が集まっています。最近ではコストの安いCMOSプロセスを用いたソリューションも登場しており、今後主流になることは間違いないでしょう。
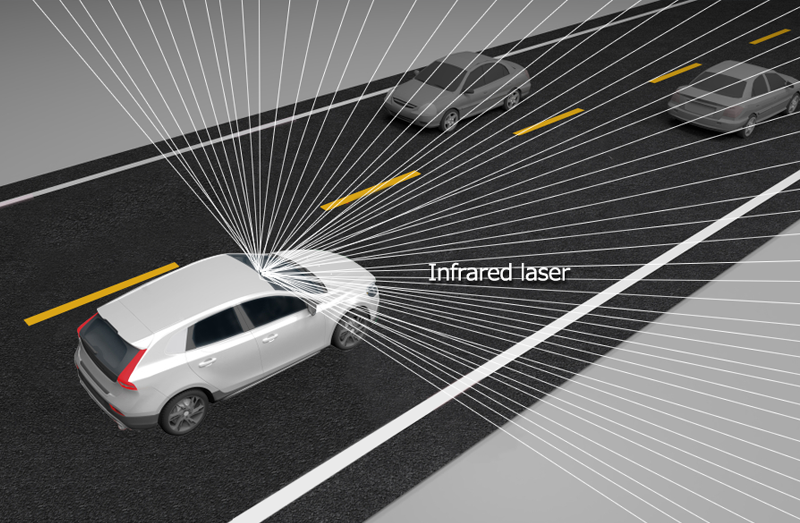
LiDAR (Light Detection and Ranging または Laser Imaging Detection and Ranging)
LiDARは電波の代わりに赤外レーザー光を使ったレーダーです。電波よりも波長が短いため高い分解能が得られる一方で、雨や霧などの気象条件に弱いという課題もあります。
それぞれのセンシング方式には長短があるため (表2) 、2種類以上のテクノロジーを融合 (フュージョン) させた「センサーフュージョン」方式も用いられています。たとえば、レベル2を上回る最先端の機能を備えたある高級車には、前方、側方、後方に合計で8台のカメラと5台のレーダーなどが搭載されているといわれています。
| カメラ | レーダー | LiDAR | |
|---|---|---|---|
| 分解能 | 〇 | △ | 〇 |
| 距離分解能 | △ | 〇 | 〇 |
| 悪天候 | △ | 〇 | △ |
| 夜間 | △ | 〇 | 〇 |
| その他 | 画像を人間が確認できるため評価が容易、低コスト | 77GHz帯が主流に | 現時点でまだコスト高 |
画像処理アクセラレータや推論器で構成される認識エンジン
カメラなどのセンサーからの情報 (イメージ情報) を元に、前方や周囲の状況を認識するのが認識エンジンあるいは画像認識プロセッサです。専用のASSPやSoCが登場していますが、汎用的なFPGAやGPUが用いられることもあります。とくに内部ロジック回路を書き換えられるFPGAは、試作におけるアルゴリズムの検証に適しています。
認識エンジンは、高性能なプロセッサ・コアを中核に、さまざまな画像処理アクセラレータで構成されています (図4) 。たとえば、イメージの回転や拡大・縮小を行うアフィン変換アクセラレータ、白線認識などに必要なエッジ検出アクセラレータ、画像の明るさ分布を得るヒストグラム・アクセラレータなどです。
安全を担保するには、システムで定められた時間内に認識処理を完了し、その結果を後段の判断システムに渡さなければなりません。そのため、それぞれの処理は逐次ではなく並列に実行されます。
認識エンジンに接続されるメモリシステムの性能も重要で、DDR2やDDR4などの高速メモリを用いるのが一般的です。
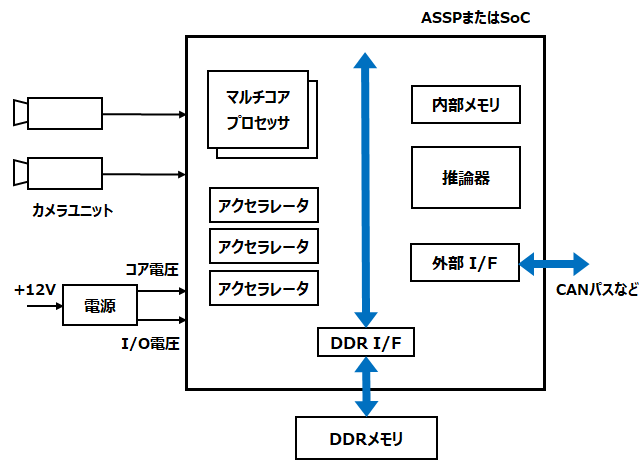
さらに近年ではディープラーニング (深層学習) の推論器も搭載されるようになってきました。従来のマッチング手法と組み合わせることで認識精度を高めようという狙いです。
さまざまな国や地域、気象条件、道路状況下において、走行時に収集された膨大なカメラ映像やレーダーイメージを、高性能なディープラーニング・システム (クラウドなど) に与えてニューラルネットワーク・モデルを構築し、認識エンジンに推論器として実装します。ただし、精度の高い推論器は多くの回路ロジックを必要とするため、ビット数の削減や枝刈り (プルーニング) などの工夫を含めて、いかに軽量化するかがポイントになります。
- 高温での動作保証や発熱の抑制が鍵
カメラ・ユニットや認識エンジンなどで構成されたシステム (ECU:電子制御ユニット) の実装にあたって注意すべきは温度です。膨大なデータ処理を高速で行うことにより電力が増大し、部品の発熱によりECU (電子制御ユニット) 全体が高温化します。また、このECUは、前方監視のためにルームミラーの背面付近に設置されることが一般的です。特に夏の炎天下では、車室内が高温になり、ECUは、その状態から始動しても正常に作動しなければなりません。
温度特性に優れていて、かつ、「 電源回路の基礎知識 (4) 」で紹介したAEC (Automotive Electronics Council) が定めたグレード0やグレード1など、動作温度範囲の広い部品を選定する必要があります。
温度上昇を抑えるにはECU自体の消費電力の削減も重要です。認識エンジンは性能を高めようとすればそれだけロジックも必要になり消費電力も大きくなりますので、バランスの取れたソリューションを選定する必要があります。また、周辺回路に使用する受動部品や、カメラ (イメージセンサー) やDDRメモリの選定には、消費電力も考えなければなりません。
- 低電圧/大電流の電源回路が必須に
電源にも注意が必要です。認識エンジンのプロセスノードの微細化に伴って、コア電圧が1.0V前後に下がっています。仮に消費電力が10Wとすると、たとえば1.0V/10Aといった出力の電源回路を用意しなければなりません。定格電圧が低くなれば許容電圧範囲も狭くなりますので、変動のない安定した電源回路が必要です。
実装面では電磁ノイズにも注意が必要です。カメラ映像やレーダーイメージにノイズが重畳すると誤認識を招きかねません。スイッチング電源 (DC/DCコンバータ) のスイッチング周波数を適切に選択するとともに、スイッチング動作に伴って電流が切り替わるループ (ホットループ) の面積を最小化するなどの工夫が必要です。また、イメージセンサーを含むセンサー出力の配線やアナログフロントエンドについても、外部ノイズの影響を受けにくいように実装する必要があります。
なお、レベル2まではドライバーが運転に責任を負いますが、レベル3以上はシステムが運転を制御するため、回路や電源などに故障 (失陥) が起きた場合でも安全性を維持できるように、たとえば電源系統を冗長化 (二重化) するなどの対応が必須になってきます。
ディープラーニングのさらなる活用が自動運転を後押し
法整備や社会的コンセンサスの問題をクリアいていく必要はあるものの、レベル3あるいはレベル4といった自動運転機能が近い将来実用化されていくことは間違いありません。その実現においては、パターンマッチングなど従来技術のさらなる向上に加え、ディープラーニングがキーテクノロジーのひとつになることは確実です。
一方、エレクトロニクスの観点では、認識エンジンやセンシングシステムの高性能化とローパワー化の両立が課題になるでしょう。性能を高めれば一般に消費電力は増え、発熱が大きくなり、バッテリの消費も早まります。性能と電力とをいかにバランスさせていくかがこれからの鍵となりそうです。
この記事に関する製品情報
この記事に関連するタグ
「回路設計の最適解」の技術情報に掲載している自動車のトレンドと技術課題(1)~(4)をまとめた資料です。