慣性センサの基礎知識
~ジャイロセンサ、加速度センサ~
2020-09-23
今、自動車は自動運転化や安全性向上、快適性向上の追求に伴って数えきれないくらい多くのセンサが使われるようになりました。
中でも ジャイロセンサや加速度センサといった慣性センサは非常に注目を集めています。
そこで今回はジャイロセンサや加速度センサの基礎的な内容について解説します。
ジャイロセンサ
ジャイロセンサとは
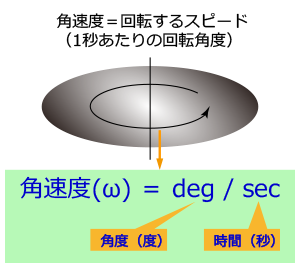
ジャイロセンサは角速度センサとも呼ばれ、コリオリ力を利用して物体の回転や向きの変化を角速度として検知し、電気信号で出力するセンサです。
つまり角速度は角度を時間で割ったもので、単位はdps (degree per second)で表します。
例えば、60秒間に1回転する物体の角速度は、360deg ÷ 60sec = 6 dpsとなります。
ジャイロセンサには機械式、光学式、振動式がありますが、最も一般的なものは振動式ジャイロセンサです。
コリオリ力について
ジャイロセンサを理解するには、まずコリオリ力について知っておく必要があります。
コリオリ力は、回転系において運動する物体に働く見かけの力です。
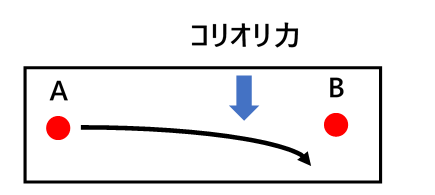
このコリオリ力とは何かについて説明する事例として、右図のA地点からB地点に向かってボールを投げる場合のボールの軌跡で説明します。
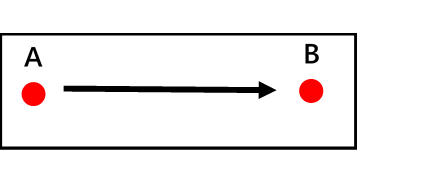
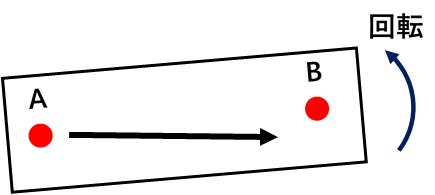
この横向きに加わる見かけの力をコリオリ力と言います。
コリオリ力は以下の計算式が成り立ちます。
F =2mvω
この関係から、角速度は以下となります。
ω =F/2mv
- F
- : コリオリ力 (N)
- m
- : 物体の質量 (kg)
- v
- : 移動速度 (m/s)
- ω
- : 角速度 (dps)
つまり、コリオリ力が計測できれば角速度を求めることができるということです。
振動式ジャイロセンサのしくみ
次に、ジャイロセンサで最も一般的な振動式ジャイロセンサについて、そのしくみを説明します。
振動式ジャイロセンサは、振動子を振動させた状態で振動子が回転することで発生するコリオリ力を検出して角速度を求めます。
検出方式としては、圧電方式や、静電容量方式などがあります。
- 圧電方式
まず、圧電方式のしくみを説明します。
始めにa)のように無回転状態で、X軸方向に振動子を一定周期で振動させておきます。これは前項でA地点とB地点でボールを投げあっている状態と言えます。
そこにb)のように回転を加えると、Y軸方向にコリオリ力が発生し、振動子がY軸方向に曲がり、圧電効果により電圧が発生します。
この電圧を測定することでコリオリ力を検出して角速度を求めます。a) 無回転状態の振動子 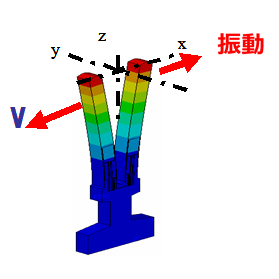
b) 回転状態の振動子 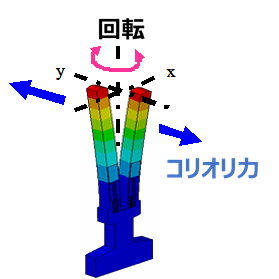
- 静電容量方式
次に静電容量方式のしくみを説明します。
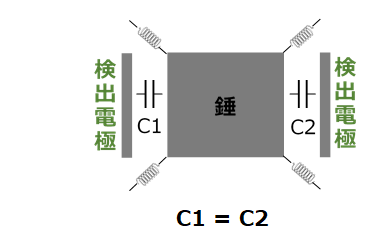
始めにc)のように無回転状態で、駆動電極に矩形波の電圧を加えて振動子をX軸方向に一定周期で振動させておきます。この時、検出電極と振動子の間の静電容量C1とC2が等しい状態であるとします。
そこにd)のように回転を加えると、Y軸方向にコリオリ力が発生し、振動子がY軸方向にずれます。
この時、検出電極と振動子の間の静電容量C1とC2に差が生じ、C1≠C2となります。
この静電容量差を測定することでコリオリ力を検出して角速度を求めます。c) 無回転状態の振動子 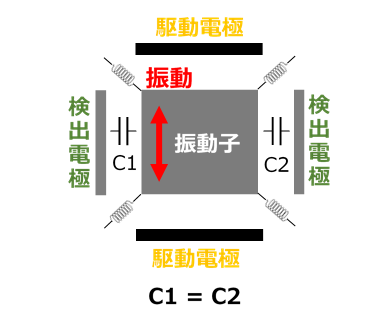
d) 回転状態の振動子 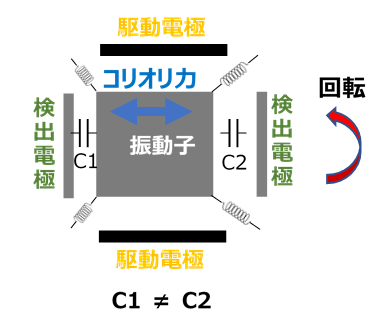
ジャイロセンサの使われ方
ジャイロセンサは、物の動き(回転)を検知して、その動きを表示したり、補正したり、動きに合せて別動作をさせたりする目的で使われます。
以下にそれぞれの使用例を記載します。
- 動きを表示する : カーナビゲーション 等
電波の届かない場所で車がどの方向に曲がったかを検知して表示します。 - 動きを補正する : カメラの手振れ補正 等
撮影時の手振れ(角度変化)を検知して、レンズ角度を補正し画像の乱れをキャンセルします。 - 動きに合せて別動作をさせる : 車のサイドエアバック、横滑り防止(ESC) 等
車が横転したことを検知して、サイドエアバックを作動させます。
車がスリップしたことを検知して、4輪のブレーキ制御を行い、車両姿勢を安定に保ちます。
加速度センサ
加速度センサとは
加速度センサは、物体の移動速度が変化する時に発生する慣性力を検知し、加速度として電気信号で出力するセンサです。
加速度とは単位時間あたりの速度の変化率のことです。
加速度の最も簡単な公式は以下です。
a=(v2-v1)/t
- a
- : 加速度 (m/s2)
- v1
- : 地点1における速度 (m/s)
- v2
- : 地点2における速度 (m/s)
- t
- : aからbへの移動時間 (s)
これは地点1で速度v1の物体が地点2までtの時間で移動しv2の速度になっていたとき、加速度aは(v2-v1)/tであるということです。
(この場合、地点1から地点2までの加速度が一定であることが前提となります)
この加速度は慣性力と相関関係にあります。
例えば自動車に乗っていて、発進するとき(加速時)には、体が後方に押し付けられる感覚があり、逆に停車するとき(減速時)には前方に押し出される感覚があります。
これは物体の速度が変化(加速、減速)するときに慣性力が働くためです。
慣性力と加速度は以下の関係があります。
F=m×a
これを変換すると以下となります。
a=F/m
- F
- : 慣性力 (N)
- m
- : 物体の重量 (kg)
- a
- : 加速度 (m/s2)
つまり、この慣性力Fが計測できれば加速度を求めることができるということです。
但し、実際の出力値としては重力加速度(G)で表す場合が多いです。
1.0G = 9.8m/s2
加速度センサは、加速度(動き)だけではなく、その信号処理によって重力、振動、衝撃などの情報も得ることができます。
加速度センサのしくみ
加速度センサは前項で述べたジャイロセンサと基本的な構造は似ていて、ジャイロセンサのように圧電方式や静電容量方式などがありますが、ここでは静電容量方式を使ってそのしくみを簡単に解説します。
始めにa)のように加速度0の状態では錘が検出電極間の中央にいるので、検出電極と錘の間の静電容量C1とC2が等しい状態です。
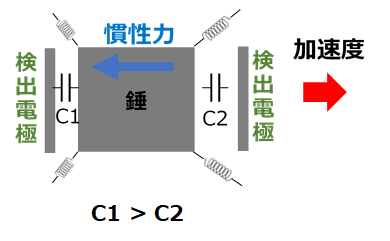
そこにb)のように加速度を加えると、反対方向に慣性力が発生し、錘がY軸方向にずれます。
この時、検出電極と錘の間の静電容量C1とC2に差が生じ、C1>C2となります。
この静電容量差を測定することで慣性力を検出して加速度を求めます。
加速度センサの使われ方
加速度センサでは「動き」、「重力」、「振動」、「衝撃」を検知できるので、この情報を用いたさまざまな使われ方があります。
- 動きを検知する : カーナビゲーション 等
電波の届かない場所で、車の加速度変化から移動距離を検知して表示します。 - 重力を検知する : スマホの画面向き変更 等
重力加速度の変化を検知してスマホの傾きを認識し、表示を縦向きや横向きに変えます。 - 振動を検知する : 地震計 等
振動方向の加速度変化から地震の揺れ幅や強さを求めて表示・記録します。 - 衝撃を検知する : エアバック 等
加速度変化から衝撃の強さを検知し、車のエアバックを作動させます。
ジャイロセンサ+加速度センサ
これまではジャイロセンサと加速度センサを別々に説明してきましたが、それぞれ単独では物体の複雑な動きを検知することはできません。
例えば、カーナビゲーションでは、ジャイロセンサで移動方向を検知し、加速度センサで移動距離を検知することで、電波の届かない場所でも現在地を正しく表示させることができます。
このように、ジャイロセンサと加速度センサの両方を搭載する機器が増えています。
また、検知の方向も1軸だけではなく、2軸(x,y方向)や3軸(x,y,z方向)でセンサを配置して、より多くの情報から、高精度に物体の動きを検知させるようになりました。
しかし、3軸でジャイロセンサと加速度センサを搭載すると最大6個の部品点数となり、スペース的にもコスト的にも採用が難しくなります。
更にそれぞれのセンサの取り付け位置のばらつきによって、データ精度が低くなる懸念があります。
そこで近年では、多軸一体型のジャイロセンサ・加速度センサや、更にジャイロセンサと加速度センサを一体化させた多軸慣性センサも商品化されています。
パナソニックでも3軸のジャイロセンサと3軸の加速度センサを1チップ化した車載6軸慣性センサ(6in1センサ)によって、小型・高精度の市場要望に対応しています。
この記事に関する製品情報
この記事に関連するタグ

「回路設計の最適解」技術情報に掲載している慣性センサの基礎知識の記事をまとめた資料です。